
Niciun produs
Prețurile includ TVA


Kit-ul include placa de dezvoltare GroundStudio Jade Uno+
Produsele create de GroundStudio sunt realizate folosind componente de calitate superioara, acestea sunt proiectate si asamblate in Romania.
 |  |
Descrierea produsului:
Asamblarea mecanica
Prezentare video: LINK
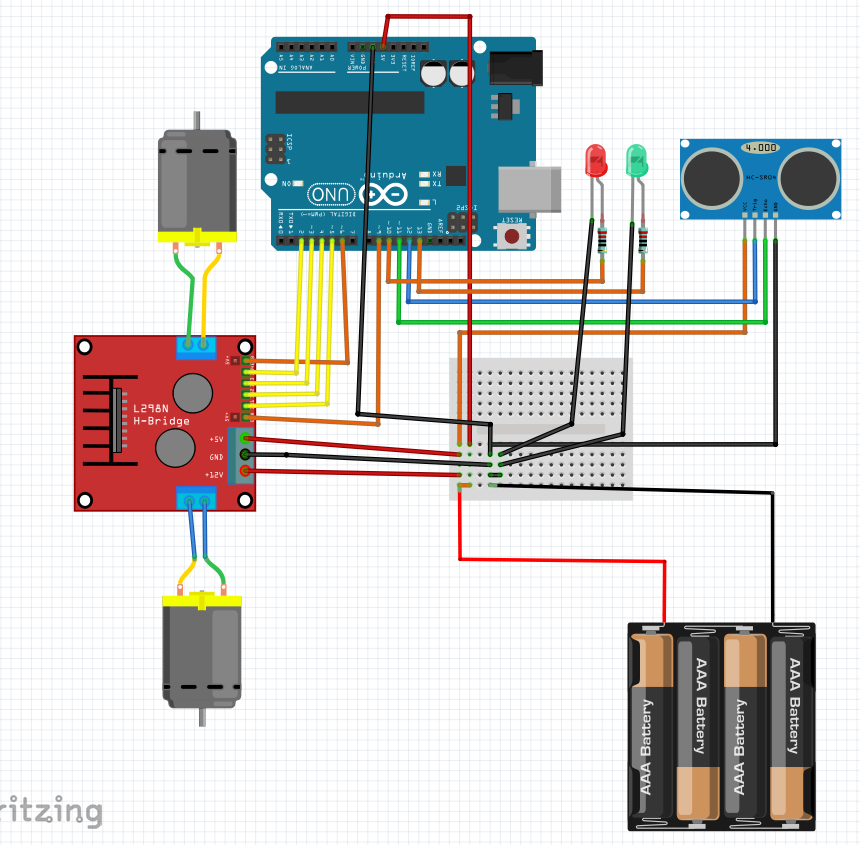
Legarea componentelor
Exemplu de conectare Arduino IDE:
Pasul 1 - Descarcati Arduino IDE
Inainte de a conecta placa incepeti prin a descarca Arduino IDE 1.8.x de la adresa de mai sus in functie de preferintele dvs. si de sistemul de operare utilizat.
Pasul 2 - Conectati placa de dezvoltare la computer
Dupa conectarea initiala prin cablu usb-c, computerul va incerca sa caute un driver compatibil. In cazul acesta se va conecta direct la windows cu ajutorul chipului HT42B534-2 deoarece driverele pentru acesta se vor instala automat.
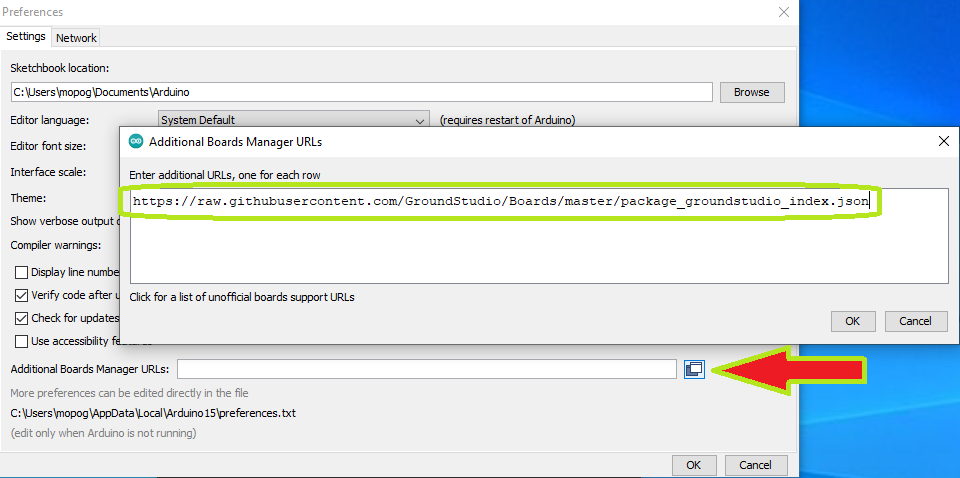
Pasul 3 - Realizarea setarilor necesare in Arduino IDE.
In "File->Preferences->Aditional Boards Manager URLs:" adaugati linkul urmator: "https://raw.githubusercontent.com/GroundStudio/Boards/master/package_groundstudio_index.json".
Accesati "Tools->Board->Boards Manager".
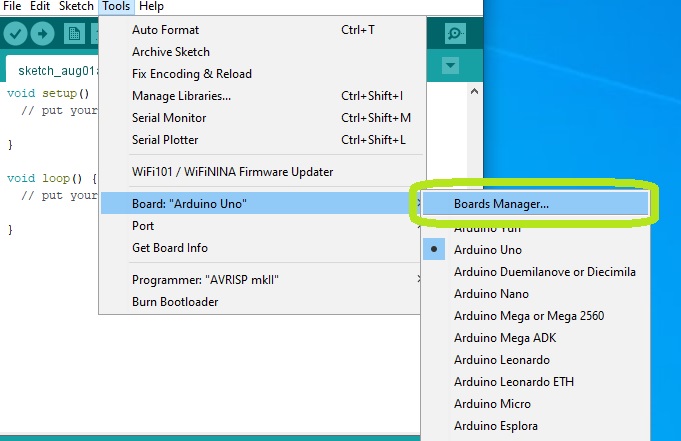
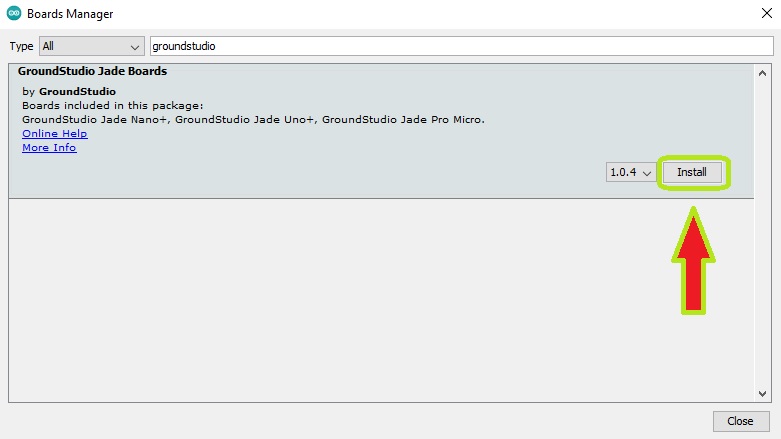
Cautati setul de board-uri "GroundStudio Jade Boards" si instalati ultima versiune disponibila.
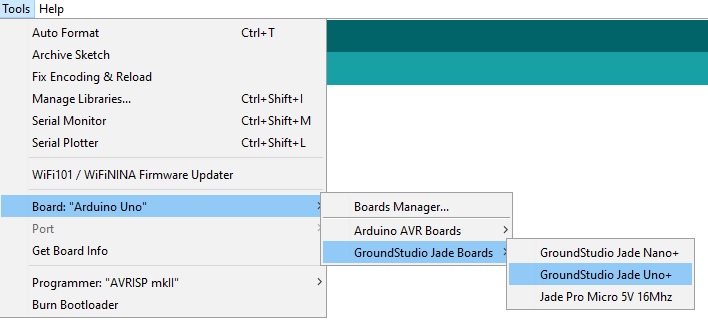
Dupa instalare, veti avea disponibil in meniul "Tools" board-ul "GroundStudio Jade Uno+"
In continuare , trebuie sa ii spunem IDE-ului Arduino la care dintre porturile seriale ale computerului nostru este conectat la Jade Uno+. Pentru aceasta, mergeti din nou la "Tools", apoi selectati portul COM al Jade Uno+.
Daca aveti mai multe porturi si nu sunteti sigur care dintre porturi este Jade Uno+, deconectati-l pentru o clipa si verificati in "Device Manager" meniul "Ports" pentru a vedea care dintre acestea dispare.
Dupa selectarea COM-ului si a Board-ului puteti incarca codul Spark2.ino disponibil in sectiunea DESCARCARI.
- NewPing1.8
NewPing1.8 - Spark - fritzing
Spark - fritzing - Spark2
Spark2
Nu sunt review-uri în acest moment.
Continutul pachetului
1 x 40 x Fire Dupont mamă-tată 20cm
40 x Fire Dupont mama-tata 20cm
5,96 lei 15,90 lei -9,94 lei cu TVAIn stoc 11,86 lei 14,61 lei -2,75 lei In stoc cu TVA
11,86 lei 14,61 lei -2,75 lei In stoc cu TVA 10,71 lei In stoc cu TVA
10,71 lei In stoc cu TVA 4,82 lei Stoc epuizat cu TVA
4,82 lei Stoc epuizat cu TVA 4,39 lei In stoc cu TVA
4,39 lei In stoc cu TVA1 x L298N Punte H dubla (dual H-bridge) motor...
1Modul punte H dublu
11,49 lei 16,44 lei -4,95 lei cu TVAIn stoc 0,27 lei In stoc cu TVA
0,27 lei In stoc cu TVA 3,12 lei In stoc cu TVA
3,12 lei In stoc cu TVA1 x Suport pentru senzor ultrasonic HC-SR04 -...
Suport printat 3d pentru senzorul ultrasonic HC-SR04.
3,12 lei cu TVAIn stoc 0,45 lei In stoc cu TVA
0,45 lei In stoc cu TVA 0,45 lei In stoc cu TVA
0,45 lei In stoc cu TVA 0,54 lei In stoc cu TVA
0,54 lei In stoc cu TVA 2,68 lei In stoc cu TVA
2,68 lei In stoc cu TVA 0,54 lei In stoc cu TVA
0,54 lei In stoc cu TVA - negru - 21mm") 4,02 lei In stoc cu TVA
4,02 lei In stoc cu TVA 5,78 lei In stoc cu TVA
5,78 lei In stoc cu TVA 55,05 lei Stoc epuizat cu TVA
55,05 lei Stoc epuizat cu TVA



 motor DC/steppe")





30 alte produse în aceeași categorie:
-

Motor pas cu pas Nema...
43,38 lei
-

Surub Philips cap...
0,57 lei -20% 0,71 lei
-
Suprafata de printare...
124,20 lei
-
Amplificator audio...
3,21 lei 4,82 lei
-

Filament Azure Film -...
103,35 lei
-
Modul incarcare si...
99,76 lei
-
Cablu 6 x 0.5mm solid...
4,28 lei
-
GroundStudio Marble Pico
18,30 lei 25,37 lei
-

Fludor 1.2mm, 100g,...
115,52 lei
-
Modul DAC audio CS4344...
14,46 lei
-
Modul DAC 1334...
31,81 lei
-

Senzor nivel...
93,98 lei
-
Modul MP3 player DY-SV8F
39,04 lei
-

Modul MP3 player...
48,44 lei
-
Amplificator 3W I2S -...
15,33 lei
-

Fotorezistenta 90mW
1,71 lei
-

Sursa alimentare 5.1V...
102,51 lei
-

Incarcator auto USB 2...
6,27 lei
-

Banda izolatoare 18m...
4,98 lei
-

Capac rosu rotund...
0,43 lei
-

Filament Azure Film -...
103,35 lei
-

Filament Azure Film -...
330,72 lei
-

Arduino Starter Kit -...
585,78 lei 644,69 lei
-

Arduino® Kit cu...
170,99 lei 197,76 lei
-

GroundStudio Carbon D4
54,82 lei 71,96 lei
-

GroundStudio Jade Mega
82,73 lei 136,28 lei
-

Raspberry Pi 4B - 4GB
552,15 lei 600,35 lei
-

Kit de baza Raspberry...
608,65 lei 683,62 lei
-

Kit media Raspberry Pi...
717,07 lei 797,40 lei
-

Kit display Raspberry...
871,10 lei


